
Process for my animation!

The first very important thing to start of this animation was to allow the robotarm to pick up the box! So I did a parent constraint from the armcontrol to the box and set it to 1 to allow the box to be picked up.

This graph editor shows the graph of the box when it's moving. This is the part for the first box, I've edited the gradients of the graph to allow an ease in and ease out for the box, this is to allow the box to come to a stop slowly instead of coming to a stop immediately.

In this frame, I'm trying to show that the base doesn't rotate at where the box is going to be putted down. The base rotates a little further and later rotates back to the original position. This is to allow the robotarm to have a jerk feeling, because of the heavy box that it's holding, when it rotates it can't possibly come to a stop immediately so I allowed the base to rotate a little more to allow that "jerk" movement.

In this frame, I applied the squash and stretch effect on the box to show that after the box is being placed on the platform, there is a volume and to show the box is heavy.

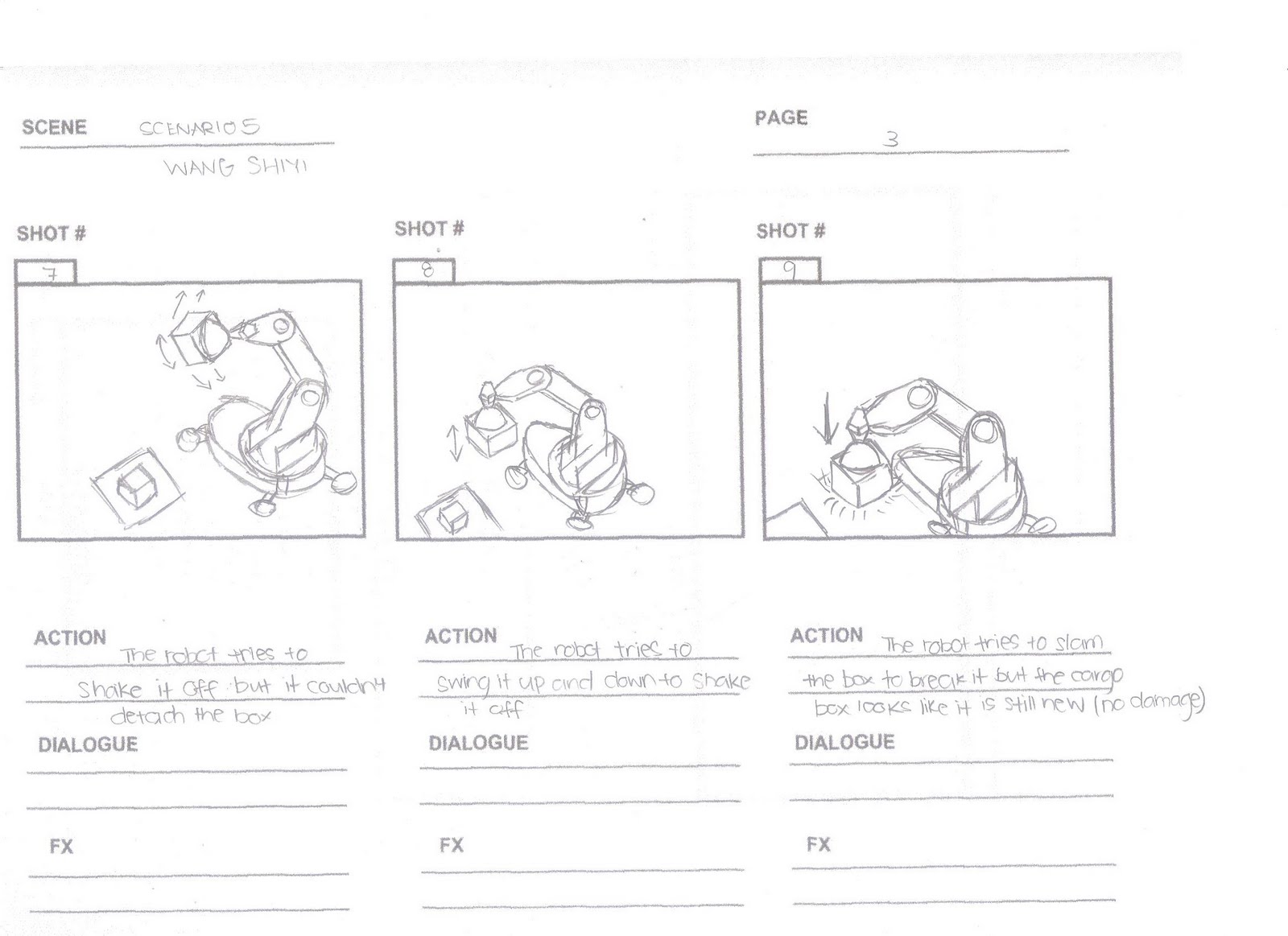
In this frame, whenever the armcontrol lifts up a box the robotarm will move up and down a bit to show that the box that the robotarm just picked up has a heavy weight.

In this frame, I'm trying to show that the robotarm is trying to shake off the box but it's still attached to it. I did this by applying constraint towards ikhandle, because I can't apply to joint4 and it doesn't work, so I had to apply to ikhandle instead of joint4.

In this frame, when the robotarm got pissed, instead of trying to shake off the box, he is trying to break the box instead shaking it off! I applied squash and stretch here to make it feels like the robotarm is really trying it's best to break the box.

In this frame, I made the box and robotarm move according when the robotarm is spinning, to allow the follow through effect so that the animation won't look so stiff. I rotated ikhandle and the armcontrol to allow this movement throughout the spinning animation. I also made the swing more realistic by adjusting the height of the armcontrol at certain frames to make it look like the swing is getting higher and higher.

In this frame, it shows the robotarm finally got rid of the box and the box is now being fling away. I did some rotation on the box so that the box doesn't just flies away in a certain position, it actually rotates while it's "flying" away.

This graph editor shows the gradient of the base being rotated. This is the part when the robotarm swings at a super high speed to shake off the box. The gradient is being edited to such that the swinging speed is gaining speed as it turns around.
Self-Critique
Firstly, at the start of the animation when the box starts moving in and the robotarm starts following the box, the speed of the animation could be faster as I could key at an earlier frame. I tried editing to make it look faster but the there were too many to edit at the end of the animation and there might be some errors and difficultly. Therefore the speed at the start of the animation should be faster so that the animation will look a lot smoother.
Secondly, at 0.05 - 0.06 when the base started to rotate, I should have animated the follow through movement for the box by rotating it to the side. However looking at the joints of the robotarm I find it logically impossible to do that as the joints don't allow me to have that follow through movement. It only allows the armcontrol to rotate front and back but not to the side. Although my entire animation I did rotate the armcontrol to allow that follow through movement.
Thirdly, 0.07 - 0.08 when the robotarm finished placing the box it rotates too quickly back to the position to start picking up the box. I took into consideration that after releasing that heavy box, the robotarm can rotate at a much faster speed back to the original position but i made a mistake by rotating it back too fast.
Fourthly, 0.16 - 0.17 when the robotarm was shaking the box front and backwards, I did not animate it shaking left to right because of the joints of the robot, in terms of polygon structure. If you look closely at the model, it is only logically possible to rotate front and backwards. That's the reason I didn't animate it shaking it left and right, even though animating that would make it more realistic. I took in consideration of the actual model and the type of movement it is able to do before animating it.
Fifthly, at 0.22 - 0.28 when the robotarm is swinging I did the follow through for the box when it's spinning, I did the follow through effect here to make it looks exaggerating.
Lastly, I couldn't finish animating the last few frames of my animation to allow the robotarm to pick up the last box and stack it on the first box because of some technical issues with my armcontrol. I can't seem to move my armcontrol after frame 671 in maya. Which is after the robotarm threw the box away, I tried solving but the error seems to be unsolvable.



{kind=link}